(ICRA 2019) Visual-Odometric On-SE(2) Localization and Mapping
C++403mit
6 months ago
g2ograph-optimizationicra
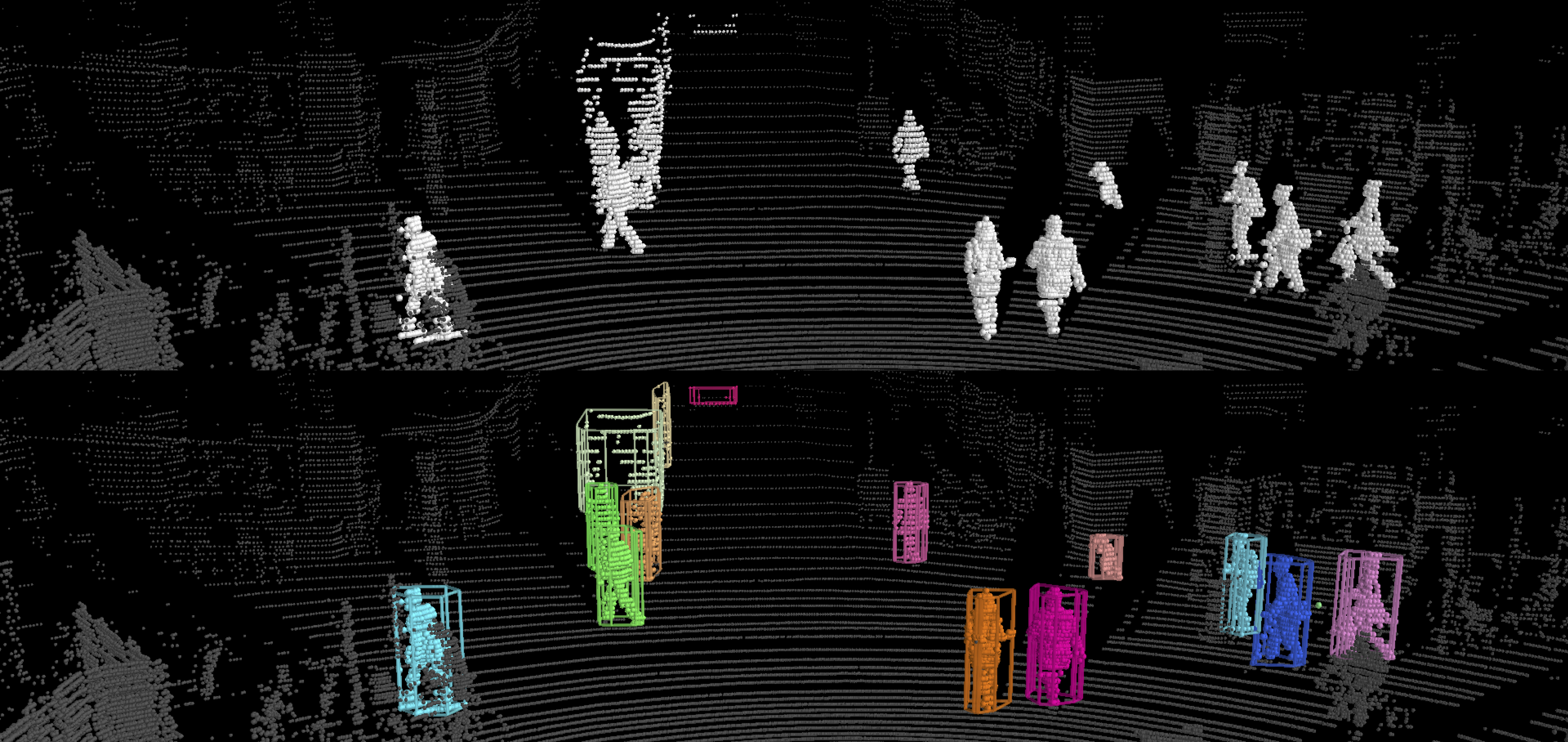
Learning to Optimally Segment Point Clouds, RAL/ICRA 2020
Python23bsd-3-clause
4 years ago