M-LOAM
Robust Odometry and Mapping for Multi-LiDAR Systems with Online Extrinsic Calibr
C++455
9 months ago
calibrationlidarrobotics

LARVIO
A lightweight, accurate and robust monocular visual inertial odometry based on M
C++736
7 months ago
ekf-mono-slamlarviolocalization


floam
Fast LOAM: Fast and Optimized Lidar Odometry And Mapping for indoor/outdoor lo
C++1036other
4 months ago
aloamloamlocalization
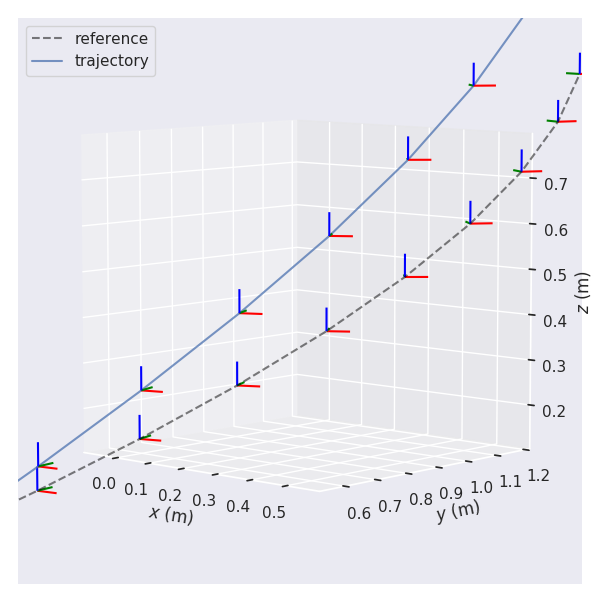
evo
Python package for the evaluation of odometry and SLAM
Python3369gpl-3.0
5 months ago
benchmarkeurocevaluation

pyslam
pySLAM contains a Visual Odometry (VO) pipeline in Python for monocular, stereo
Python1884gpl-3.0
5 days ago

LeGO-LOAM
LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variab
C++2419bsd-3-clause
3 months ago
gtsamieeeimu

LIO-SAM
LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
C++3489bsd-3-clause
2 months ago
3d-mappinglidar-inertiallidar-odometry

loam_livox
A robust LiDAR Odometry and Mapping (LOAM) package for Livox-LiDAR
C++1470gpl-2.0
5 years ago
livox-lidarloam
ESVO
This repository maintains the implementation of "Event-based Stereo Visual Odome
C++433
2 years ago

loam_velodyne
Laser Odometry and Mapping (Loam) is a realtime method for state estimation and
C++1683other
5 years ago
3dcomputer-visionlidar
lio-mapping
Implementation of Tightly Coupled 3D Lidar Inertial Odometry and Mapping (LIO-ma
C++906gpl-3.0
5 years ago
icra2019mappingsensor-fusion