
hdl_graph_slam
3D LIDAR-based Graph SLAM
C++2016bsd-2-clause
4 months ago
hdl-graph-slamlidarpoint-cloud
interactive_slam
Interactive Map Correction for 3D Graph SLAM
C++851gpl-3.0
4 months ago
guihdl-graph-slamlidar

semantic_suma
SuMa++: Efficient LiDAR-based Semantic SLAM (Chen et al IROS 2019)
C++923mit
8 months ago
3d-lidarlidarrangenet-lib

lidarslam_ros2
ROS 2 package of 3D lidar slam using ndt/gicp registration and pose-optimization
C++480bsd-2-clause
6 months ago
lidarlocalizationmapping

li_slam_ros2
ROS 2 package of tightly-coupled lidar inertial ndt/gicp slam
C++286bsd-2-clause
12 months ago
g2ogicpgtsam
metaphore
Cache slam defense using a semaphore to prevent dogpile effect.
PHP101mit
9 months ago
cachingphp

slam_toolbox
Slam Toolbox for lifelong mapping and localization in potentially massive maps w
C++1540lgpl-2.1
4 months ago
ORB_SLAM3
ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi
C++6634gpl-3.0
4 months ago
slam-algorithms
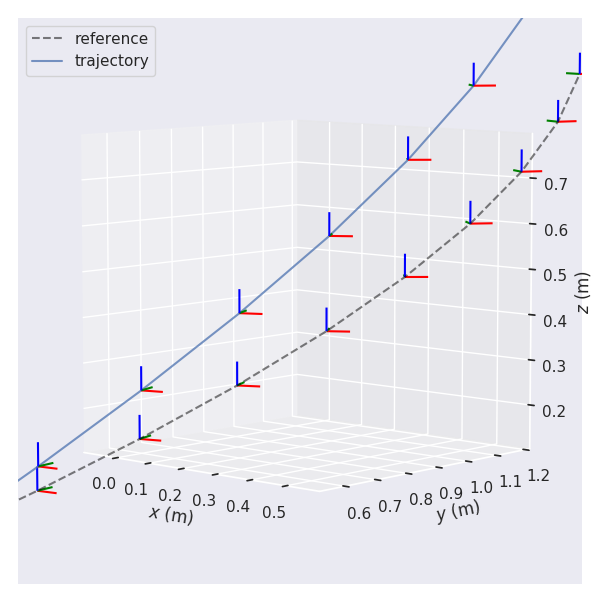
evo
Python package for the evaluation of odometry and SLAM
Python3369gpl-3.0
5 months ago
benchmarkeurocevaluation

mp2p_icp
Multi primitive-to-primitive (MP2P) ICP algorithms in C++
C++174bsd-3-clause
3 months ago
icppoint-cloudsregistration
cartographer
Cartographer is a system that provides real-time simultaneous localization and m
C++71apache-2.0
8 months ago
cartographer
Cartographer is a system that provides real-time simultaneous localization and m
C++7173apache-2.0
11 months ago
localizationmappingrobotics

mola
A Modular Optimization framework for Localization and mApping (MOLA)
C++400other
3 months ago
computer-visioncxxcxx17
OpenCamera-Sensors
Android app for synchronized recording of video and IMU data on one or multiple
Java47gpl-3.0
2 years ago
cameradata-collectiondata-collector

semantic_slam
Real time semantic slam in ROS with a hand held RGB-D camera
C++620gpl-3.0
6 years ago
3d-reconstructionoctomapros

interactive_slam
Interactive Map Correction for 3D Graph SLAM
C++829gpl-3.0
2 years ago
guihdl-graph-slamlidar

OverlapNet
OverlapNet - Loop Closing for 3D LiDAR-based SLAM (chen2020rss)
Python647mit
2 years ago
3d-lidarlidarloop-closing

gradslam
gradslam is an open source differentiable dense SLAM library for PyTorch
Python1321mit
last year
3d-reconstructiondeep-learningmachine-learning